目次
展望・総説・解説
持続可能な機械システムの実現
日本大学 工学部 機械工学科 教授
武藤伸洋
連載講座
CFDの基礎講座(36)
相転移のIsingモデルと数値解析 その2
慶應義塾大学 名誉教授
棚橋隆彦
詳しく学ぶ ねじ締結の基礎(25)(26)(27)
第4部 ねじ締結部の信頼性評価時の留意事項(5)(6)(7)
酒井ねじ締結相談室 室長 工学博士
日本機械学会フェロー
酒井智次
流体シミュレーション・ソフトウェア講座
Flowsquare+による数値熱流体力学(5)
Nora Scientific 代表
東京工業大学 工学院 助教
源 勇気
パリ協定以降の世界と日本のエネルギー動向(33)
水素エネルギー社会の課題と展望 その2
一般財団法人 航空宇宙技術振興財団 評議員
伊藤義康
機械構造用金属材料の超高サイクル疲労(30)
6. VHCF–2~VHCF–4の10年間の研究動向(10)
立命館大学 名誉教授
酒井達雄
コラム:一杯のコーヒーから(168)
「なぜ?」が多いTelework
Stanford University visiting professor
慶應義塾大学 顧問
福田収一
歴史に学ぶ「機械の研究」
創刊当時の編集方針と巻頭記事
編集部
特別講座:機械系大学院入試問題演習(1)
材料力学:東京大学2019年夏季実施より
神奈川大学 名誉教授
伊藤勝悦
新刊紹介
工学・工業界ニュース
説明
巻頭記事「持続可能な機械システムの実現」
近年、日本の少子高齢化・労働人口の減少という観点から、ロボットやAI導入の重要性が高まっている。産業用ロボットはこれまで大企業の工場で広く普及し、昭和から平成、令和と時代が変わるにつれて、大量生産から多品種少量生産、変種変量生産といった形で適用され、人間の作業者は到底実現できないような精密な作業を24時間365日体制で遂行できる。
これからの時代は、このような能力を持ったロボットを、これまでロボットが導入されてこなかった産業分野に利用することが求められている。例えば中小の食品工場では、ロボット作業範囲を柵で囲う必要のない協働ロボットの導入が始まりつつある。イメージとしては、生産ラインに並ぶ作業員の何名かの場所に協働ロボットが配置されて、作業員と並んで作業をするものである。協働ロボットの製造に関しては、これまでの大手産業用ロボットメーカだけでなく、国内外のベンチャー企業が多くのロボットを開発して、近年のロボット展示会の主役のひとつとなっている。
工場の外を出たところでは、緊急時を想定した災害対応でのロボット導入が進められている。また橋梁や高速道路、トンネルなどの社会インフラの老朽化に対して、これまで人手で実施してきた点検作業に、ロボットやAI技術を導入する試みがおこなわれている。現状は大規模な設備を対象としたものが多いが、今後は個々の企業や規模の小さな自治体等が保有する設備の点検や維持管理、運用といった点でもこれらの技術が必要になってくると考えられる。
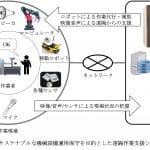
このような背景の中、当研究室では、労働人口減少に対応して機械設備の運用を持続可能なものとするため、ロボットやセンサ、ネットワークを利用した機械システムの実現を目指している。このような機械システムを導入した機械設備の保守点検や運用を考えるうえで、以下のポイントを重要視している。
- ネットワークを介して操作者が遠隔地から効率よく作業できること。
- ベンチャー企業等が開発した安価なシステムを組合わせて構築できること。
- ロボットの専門家でなく、機械設備の専門家が使いやすいインタフェースを具備すること。
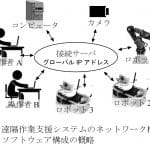
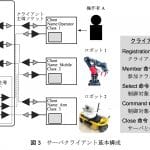
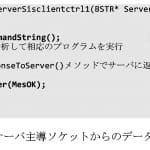
記事では、持続可能な機械システムの実現を目的に研究開発を進めてきた遠隔作業支援システムを紹介する。まず、システム全体の構成と概要を説明し、次に具体的な例として、遠隔点検を目的とした移動ロボットシステムと、遠隔操作マニピュレータの操作インタフェースの構築例について解説する。
日本大学 工学部 機械工学科 教授
武藤伸洋




















レビュー
レビューはまだありません。